AGV小車管控系統
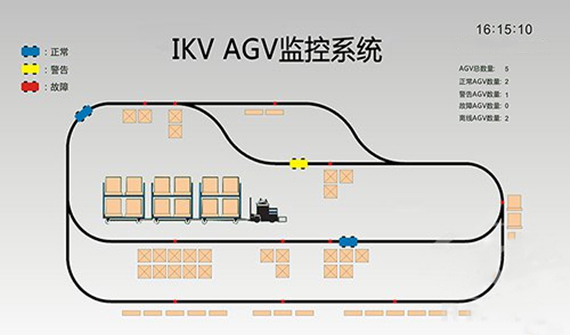
AGV(自(zì)動導引車)管控系統是智能(néng)制造中實現物流自(zì)動化與生(shēng)産協同的核心模塊,通過(guò)與MES(制造執行(háng / xíng)系統)、WMS(倉儲管理系統)等集成,完成物料搬運、路徑規劃、任務調度等全流程管控。其(qí)系統組成、技術架構及核心優勢的整合分析如(rú)下(xià):
一、系統組成與功能(néng)
調度中心(MES/WMS協同)
MES系統根據生(shēng)産計劃生(shēng)成物料搬運需求,動态下(xià)發(fā/fà)任務至AGV調度系統,實現“生(shēng)産缺料-AGV補料”閉環。
WMS與AGV聯動優化庫位分配,通過(guò)掃碼/RFID識别物料位置,支持動态貨位調整與柔性倉儲管理。
2. 導航與定位系統
采用(yòng)激光導航(自(zì)然輪廓建模)、磁條導航或視覺SLAM技術,結合編碼器與IMU傳感器實現厘米級定位。
實時避障算法(如(rú)激光雷達+超聲波)保障人機混場作業安全。
3. 運動控制與執行(háng / xíng)層
支持差速輪、舵輪、麥克納姆輪等多種運動模型,通過(guò)PLC或工控機實現精準轉向與速度控制。
擴展功能(néng)模塊(如(rú)頂升、滾筒、叉車)适配不同搬運場景。
二、技術架構特點
1. 通信協議與數據集成
MES通過(guò)MQTT/OPC UA協議與AGV調度系統交互,實時傳輸任務指令與設備狀态。
邊緣計算節點預處理AGV傳感器數據,減少雲端負載并提升響應速度。
2. 動态路徑規劃算法
基于(yú)蟻群算法、A*算法等優化全局路徑,結合實時交通管制(如(rú)擁堵區域避讓)調整局部路線。
數字孿生(shēng)模型模拟AGV運行(háng / xíng)狀态,預判潛在沖突并優化任務隊列。
三、典型應用(yòng)場景
倉儲物流:AGV實現“貨到人”揀選,通過(guò)WMS指令自(zì)動完成入庫、出庫及移庫任務,降低人工耗時30%+。
生(shēng)産車間:MES觸發(fā/fà)AGV補料指令,将原料/半成品精準配送至工位,減少生(shēng)産線停機等待。
柔性制造:支持多車型混線調度,快速适配工藝變更與小批量訂單需求。
四、核心優勢
效率提升:AGV任務響應速度達毫秒級,物流搬運效率提高40%-60%。
成本優化:減少人工搬運成本50%以上,同時降低物料錯配率。
安全可(kě)控:多層防護(急停按鈕、防撞條、電子圍欄)保障人機協同安全性。
管理升級:全流程數據可(kě)視化(如(rú)任務完成率、設備利用(yòng)率)支持決策優化。



 掃一掃添加微信
掃一掃添加微信